Im letzten Jahr haben wir uns an der Professur Montage- und Handhabungstechnik dazu entschlossen, sämtliche unserer Lehrveranstaltungen über die Lehr- und Lernplattform OPAL zu organisieren – von der Einschreibung über die Bereitstellung von Lehrmaterial bis hin zur einheitlichen Kontaktaufnahme bei Problemen und Nachfragen. Im Zuge dessen haben wir erstmals Methoden des Blended Learning eingesetzt und deren Einfluss auf die Lernleistung der Studierenden untersucht. Dank des Digital Fellowship Programms eröffnet sich mir nun die Möglichkeit, die Digitalisierung der Hochschulbildung für unsere Lehrveranstaltungen weiter voran zu treiben.
Digital Fellowship als Wegbereiter moderner Lehre
 Das am 01.09.2019 gestartete Projekt ist mit dem kryptischen Titel „Interdisziplinärer Kompetenzerwerb für die industrielle Robotertechnik“ versehen. Einfach ausgedrückt handelt sich dabei um eine Erweiterung der an der Fakultät Maschinenbau etablierten Veranstaltung „Montage- und Handhabetechnik/Robotik“ (MHR), bei der Masterstudierende einen Überblick über die Verfahren und Geräte für Montage- und Handhabungsaufgaben erhalten, welche den Grundstein unserer automatisierten, maschinellen Produktion bilden. Aufgrund der Tatsache, dass klassische Mechanismentechnik und Montageanlagen dabei immer mehr von frei programmierbaren, flexiblen Robotersystemen ersetzt werden, hat sich der Fokus der Veranstaltung in den letzten Jahren verschoben. Die sogenannte industrielle Robotertechnik und die damit verbundenen mechatronischen Antriebssysteme sollen in Zukunft den Kern dieser Veranstaltung bilden und somit die Studierenden auf das stark interdisziplinäre Umfeld von Industrie 4.0 und automatisierter Produktion vorbereiten.
Das am 01.09.2019 gestartete Projekt ist mit dem kryptischen Titel „Interdisziplinärer Kompetenzerwerb für die industrielle Robotertechnik“ versehen. Einfach ausgedrückt handelt sich dabei um eine Erweiterung der an der Fakultät Maschinenbau etablierten Veranstaltung „Montage- und Handhabetechnik/Robotik“ (MHR), bei der Masterstudierende einen Überblick über die Verfahren und Geräte für Montage- und Handhabungsaufgaben erhalten, welche den Grundstein unserer automatisierten, maschinellen Produktion bilden. Aufgrund der Tatsache, dass klassische Mechanismentechnik und Montageanlagen dabei immer mehr von frei programmierbaren, flexiblen Robotersystemen ersetzt werden, hat sich der Fokus der Veranstaltung in den letzten Jahren verschoben. Die sogenannte industrielle Robotertechnik und die damit verbundenen mechatronischen Antriebssysteme sollen in Zukunft den Kern dieser Veranstaltung bilden und somit die Studierenden auf das stark interdisziplinäre Umfeld von Industrie 4.0 und automatisierter Produktion vorbereiten.
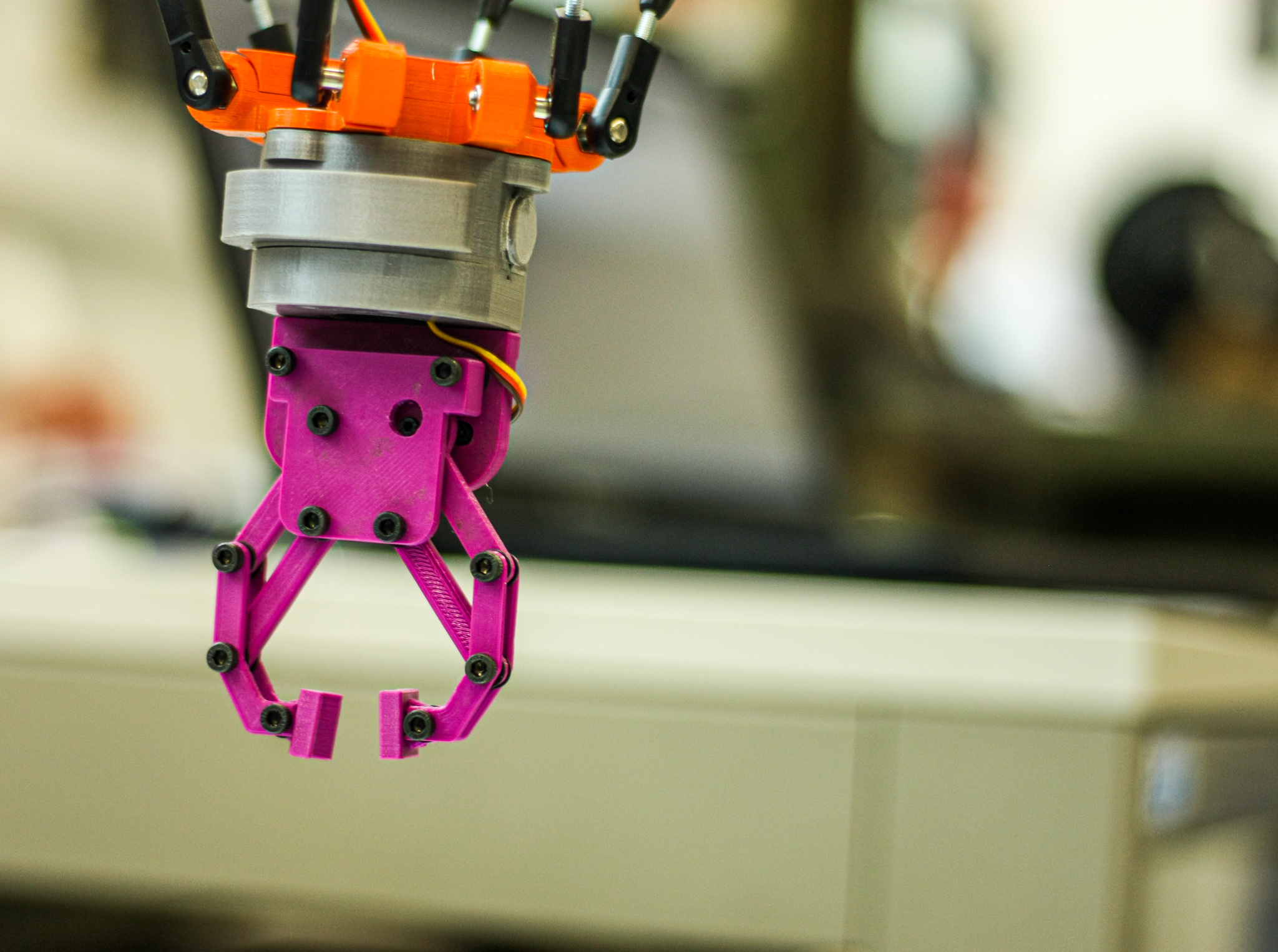
Im Rahmen des Vorhabens werden nun an der Professur MHT die Voraussetzungen geschaffen, dass Studierende in der Lehrveranstaltung MHR selbstständig Robotersysteme aufbauen. In semesterbegleitenden Tutorien erstellen und montieren Gruppen (bis zu 5 Studierende) Industrieroboter in verkleinertem Maßstab aus 3D-gedruckten Bauteilen sowie elektrischen und mechanischen Komponenten. Diese sind nach der Programmierung voll funktionsfähig und dienen im Theorieteil der Lehrveranstaltung der Verdeutlichung der behandelten Berechnungs-. Analyse- und Optimierungsverfahren. Die praktischen Tätigkeiten machen die Grundlagen der vollautomatischen, digitalen Produktion greifbar und bringen den Studierenden gleichzeitig folgende disziplinenübergreifende Konzepte näher: direkte Antriebssysteme, Aufbau und Funktionsweise mechatronischer Achsen, Pick&Place-Einheiten, Portalmaschinen und Ansätze der Bewegungsplanung für mehrachsige, nichtlineare Robotersysteme.
Für das Digital Fellowship Programm gilt es nun drei wesentliche Aufgaben digitaler Lehre im Verlauf des Projekts anzupacken:
Aufbau digitaler Kompetenzen bei Lehrenden und Studierenden
Die Robotik bildet eine Schnittmenge zwischen klassischem Maschinenbau, der Elektrotechnik und Informatik. Sie passt somit bereits thematisch in das von Mechatronik durchsetzte Thema der Digitalisierung unserer Alltagswelt. Ein Maschinenbau ohne elektrische Antriebe, Sensortechnik und programmierte Steuerungssysteme ist nicht mehr wegzudenken. Kompetenzen in diesem Bereich zu erwerben, bedeutet also auch, Kompetenzen für andere von Digitalisierung betroffene Bereiche aufzubauen.
Anwendung digitaler Lehr- und Prüfungsmethoden
Wie bereits erwähnt, haben wir an der Professur erste Erfahrungen beim Einsatz digitaler Lehrwerkzeuge machen können. Dies soll nun konsequent fortgeführt werden:
- Simulationen, welche am PC, im Webbrowser oder auch unterwegs am Smartphone gestartet werden können, um spielerisch ein Verständnis der in der Vorlesung besprochenen Inhalte zu entwickeln
- Auf Basis von ONYX erstellte Online-Selbsttests zur kontinuierlichen Prüfung des Wissensstandes der Studierenden während des Semesters
- Verwendung von Gamification-Elementen zur Förderung der Motivation als Antrieb für ein Interessen geleitetes Selbststudium
Verankerung von Open Educational Ressources (OER) in der Lehrpraxis
Lehre gelingt am besten, wenn man auf die in vielen Jahren gemachten Erfahrungen von Kollegen zurückgreifen kann. Gerade im Zuge der Digitalisierung der Lehre bietet sich hierbei die Chance diese Erfahrungen nicht nur im Umfeld der Professur, sondern auch mit Kollegen anderer Institute, Universitäten oder auch einfach nur mit Interessierten zu teilen. Deswegen sollen möglichst alle im Projekt erstellten Daten und Materialien unter einer offenen Lizenz zur Verfügung gestellt werden. Darunter fallen sowohl CAD-Daten für den 3D-Druck, Quelltexte für die erstellten Simulationen und Programme, sowie bebilderte und mit Videos versehene Aufbauanleitungen der Robotersysteme. Zuletzt soll ein öffentlich zugänglicher, jederzeit im Selbststudium durchführbarer Kurs im OPAL entstehen.
Wie lauten also die ersten Schritte?
Nun gilt es also loszulegen: Konstruktionen müssen erstellt, Bauteile gedruckt oder bestellt und Lehrmaterial konzipiert werden. Diese ganze Arbeit ist nicht allein zu schaffen, weswegen studentische Hilfskräfte gern gesehen sind. Somit kann nun Stück für Stück das Vorhaben in die Tat umgesetzt werden. Ein erster Schritt ist bereits getan: Es gibt schon einen OPAL-Kurs.
Schreibe einen Kommentar